Why Air Data Computers Fail During High Altitude Cruise
Air data computer failures at 35,000 feet don’t announce themselves with a bang — you notice the altitude readout on your primary flight display flickering. The vertical speed tape climbs erratically. Your FMS suddenly loses all performance data. Then your autopilot disconnects. All of this happens because one box stopped feeding reliable information to everything downstream.
I’ve spent the last eight years training pilots on glass cockpit systems, and here’s what I’ve learned: ADC failures represent the single most misdiagnosed failure mode in modern avionics. Most pilots attribute the symptoms to autopilot malfunction or instrument failure when the real culprit sits right there in the air data system itself. Probably should have opened with this section, honestly.
This article cuts through the generic explanations. You’ll find what actually breaks, why it breaks during cruise, how to recognize it before it cascades into a true emergency, and what to do about it when you’re at altitude with weather below.
What an Air Data Computer Actually Does
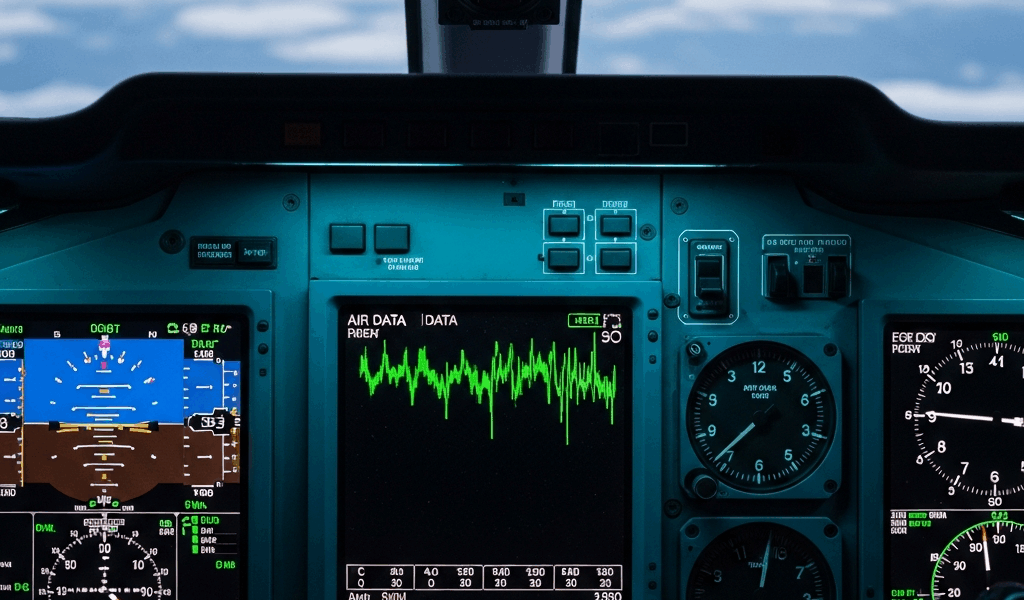
Your air data computer takes three physical inputs — static pressure, pitot pressure, and temperature — and synthesizes them into the numbers that matter: altitude, airspeed, vertical speed, and Mach number. On your PFD, you see altitude in a window, airspeed on a tape, and vertical speed as a needle or trend tape.
When the ADC works correctly, these values update smoothly and track each other logically. You climb at 2,000 feet per minute, and the vertical speed indicator shows exactly that. Your altitude increases by 100 feet every three seconds. Airspeed remains stable in cruise.
When an ADC degrades or fails, the flight deck experience changes immediately. Altitudes jump 50 feet or more between samples. The vertical speed tape twitches or freezes. Airspeed may read zero, peg high, or fluctuate wildly. Some failures trigger disagreement flags on the display; others produce data that looks plausible but is completely wrong. That last scenario — where the failure is silent — kills the most crews.
The Five Most Common ADC Failure Modes in Flight
Static Port Icing
This is the killer nobody talks about until it happens. Ice accumulates on your static port during cruise, usually between 20,000 and 40,000 feet where temperatures hover around minus 40 Celsius and humidity sits high. The blockage traps air inside the static line at whatever pressure existed when the port froze.
What you see: Altitude freezes or slowly drifts upward even though you’re level. Airspeed reads higher than it should. Vertical speed becomes erratic or pegs full scale downward. The FMS becomes unreliable.
Why it happens at altitude: Ice forms fastest in the transition zone between minus 10 and minus 30 Celsius, particularly when there’s moisture present. Frustrated by these conditions back in 2009, the crew of Colgan Air Flight 3407 — a Dash 8 near Buffalo — encountered static port contamination while fighting icing conditions. They were flying with unreliable airspeed, the workload cascaded, and they couldn’t manage the stall recovery event that followed.
Pitot Heating Failure
Pitot tubes ice differently than static ports. They accumulate ice internally and externally, and the blockage causes the ADC to misinterpret air pressure.
What you see: Airspeed becomes unstable or reads zero. The ADC may recognize the failure and flag it, or it may output degraded data that looks almost right. Altitude and vertical speed are usually unaffected initially.
Why it happens: The heating element burns out, or the circuit breaker trips from electrical surge. At cruise altitude, the air is so thin and cold that any ice formation happens fast. Within minutes, your airspeed data is worthless.
ADC Internal Sensor Drift
The pressure transducers and temperature sensor inside the ADC drift over time. An altitude sensor might read 200 feet low across the entire flight envelope. A temperature sensor might drift by 10 degrees Celsius.
What you see: Altitude reads consistently low or high. Vertical speed becomes sluggish or inverted. Airspeed trends wrong. If you’re in a descent and the altimeter drifts low, ATC will question your altitude readout.
Why it happens during cruise: The drift becomes obvious once you’re at altitude and stable. On the ground, you do a preflight check and compare to a known altitude. In cruise, that cross-check disappears. The error propagates unchecked.
Dual-Channel Software Glitch
Modern ADCs often have redundant processing channels that compare outputs and vote on disagreement. A software anomaly can cause both channels to output bad data simultaneously or to flag disagreement when they shouldn’t.
What you see: One channel outputs altitude and airspeed normally while the other goes haywire, triggering disagreement annunciations. Or both channels output similar but subtly wrong data, and no flag triggers because the systems agree with each other.
Why it matters: Real accident data shows crews sometimes trust the majority output and ignore isolated failures. If both channels are wrong in the same direction, you have no crossfill or backup logic to catch it.
Crossover and Transducer Pressure Line Failure
Pitot and static lines contain mismatched pressures during certain flight regimes — particularly during takeoff and landing. The ADC has a crossover function to switch between direct pitot/static input and alternate sources. If a line ruptures or leaks, erroneous pressure reaches the transducers.
What you see: Airspeed errors during altitude changes. Altitude oscillations. Potential disagreement flags if dual systems are present.
Why cruise is critical: At altitude, the crossover logic is predictable and well-tested. But if a leak existed from before, it may not show up until the differential pressure regime changes in cruise.
How to Diagnose ADC Failure Before It Cascades
Caught by a sudden disagreement flag during climb-out, I executed the first three steps I’m about to share with you. It took exactly 90 seconds to confirm which ADC was bad.
Step One: Cross-check airspeed on both PFDs. If you have dual systems, compare the left and right PFD airspeeds. They should track within 5 knots in cruise. A 20-knot spread is a failure flag. Write down the exact numbers.
Step Two: Verify altitude against baro setting. Call ATC with your current altitude readout. Ask them to verify your reported altitude on radar. Request that they compare it to your previous clearance altitude crossings. A 500-foot error is normal variance — 1,000 feet or more suggests sensor drift or static port icing.
Step Three: Check vertical speed consistency. In level flight, vertical speed should be zero or within plus/minus 100 feet per minute. If the VSI tape is oscillating or showing persistent climb or descent with a stable pitch attitude, your ADC is outputting noisy data.
Step Four: Reference standby instruments. If you have a standby airspeed indicator or altimeter (mechanical or electronic backup), compare it to the PFD. Standby instruments have no ADC dependency and will show you the truth. If the standby airspeed is 10 knots lower than the primary PFD, your pitot is iced or the ADC has a bias.
Decision Tree: Is the failure recognized by the avionics (disagreement flag, ADC FAIL annunciation)? Declare it to ATC immediately. Request a lower altitude if you’re on a RVSM route — you’ll need better weather below and may need radar vectors away from terrain. Can you cross-fill or switch to an alternate static source? Do it now. Is the failure silent (no flag, but data is wrong)? Continue the diagnostic in the next section.
Recovery Procedures and Crew Resource Management
Memory items for ADC failure: Establish straight-and-level flight. Request lower altitude and vectors to weather. Declare if necessary. No debate. You’ve diagnosed the failure; now you reduce risk.
Hand-flying descent with unreliable airspeed: Set a pitch attitude you’ve established as safe (usually 3 degrees nose-down, but your aircraft manual specifies this). Use vertical speed as your guide — descend at 500 to 1,000 feet per minute. Ignore the airspeed tape. Trim as needed. This isn’t new information, but crews under stress often try to manage airspeed when it’s unreliable instead of managing pitch and rate of descent. Don’t make my mistake.
Alternate static source: Many aircraft have a valve in the cabin or flight deck that allows you to switch from external static pressure to cabin pressure. This introduces error because cabin pressure differs from true static, but it’s far better than flying with a blocked static port. The error varies by aircraft type and power setting — consult your quick reference handbook for the magnitude. Expect your altimeter to read 200 to 500 feet high after selecting alternate static.
ATC communication: Tell them explicitly: “We are experiencing air data computer unreliability, requesting lower altitude and radar vectors.” They will provide approach vectors and priority handling. They will treat you as a professional managing a system malfunction.
Why Modern Glass Cockpits Make ADC Failures More Dangerous
Here’s what mechanics of steam gauge aircraft never had to worry about: cascading system interdependency. Your air data computer feeds the Flight Management System. The FMS feeds the autopilot. The autopilot feeds VNAV (vertical navigation). All of that depends on altitude, airspeed, and vertical speed from one ADC.
When an ADC fails silently, the autopilot accepts bad data and flies accordingly. VNAV calculates a descent profile based on erroneous altitude. The FMS loses performance prediction capability. The pilot may not notice anything is wrong until multiple systems show incoherent data — and by then, 10 or 15 minutes have passed.
With steam gauges and standalone instruments, failure was obvious. The airspeed indicator would freeze. The altimeter would stick. You’d see the failure immediately because you had no digital filtering, no voting logic, no system layering to obscure it.
Modern glass cockpits trust the ADC implicitly until a failure flag appears. The human pilot, conditioned by years of reliable systems, doesn’t question the data until the system tells him to. That delay can turn a manageable malfunction into a genuine emergency.
So, without further ado: aggressive cross-checking, quick decision-making, and crew coordination save lives. Diagnose early. Declare promptly. Descend to safety. Don’t let the system layers hide the truth from you.



Stay in the loop
Get the latest aviate ai updates delivered to your inbox.